Hoe je snel een ontwerp voor borstelloze DC-motorbesturing kunt beginnen met hooggeïntegreerde IC's
Bijgedragen door De Noord-Amerikaanse redacteurs van DigiKey
2021-11-02
Dankzij een steeds snellere verschuiving naar elektronische besturing van mechanische systemen — grotendeels aangedreven door het Internet of Things (IoT) — en de elektrificatie van auto's, gebruiken ontwerpers low-power motoren voor basistaken in toepassingen variërend van huishoudelijke apparaten, deursloten en op afstand bediende jaloezieën tot autopompen, -stoelen, -ramen en -deuren. Deze gelijkstroommotoren lopen qua vermogen uiteen van kleine, subfractionele pk's tot meerdere pk's en zijn alomtegenwoordig, maar vaak ongezien.
Hoewel verbeteringen in de motoren en een betere en gebruiksvriendelijkere motorbesturingstechnologie deze snelle toename bevorderen, staan ontwerpers onder constante druk om efficiëntie te verbeteren en kosten te verlagen, terwijl zij ook een hogere nauwkeurigheid en betrouwbaarheid moeten bereiken.
Varianten van de borstelloze gelijkstroommotor (BLDC) en de stappenmotor (een ander type borstelloze gelijkstroommotor) kunnen ontwerpers helpen om aan deze steeds veeleisender prestatie- en kostendoelstellingen te voldoen, maar alleen als zorgvuldig wordt nagedacht over de motorcontroller en het motoraandrijvingscircuit. De controller moet geschikte aandrijfsignalen aan de elektronische aandrijfschakelaars van de motor leveren (gewoonlijk MOSFET's), met zorgvuldig gecontroleerde timing en duur. Ook moet de controller het op- en neerwaartse traject van de motor regelen én de onvermijdelijke 'zachte' problemen en totale storingen van de motor of de belasting opsporen en verhelpen.
In dit artikel wordt ingegaan op de functies van besturings-IC's voor BLDC-motoren. We geven een algemeen overzicht van de elektrische eigenschappen van BLDC-motoren en leggen aan de hand van de RAJ306010-serie motorbesturings-IC's van Renesas uit hoe een geavanceerde besturing een BLDC-motor in staat stelt om aan de toepassingsdoelstellingen te voldoen.
Het motorbesturingstraject en de motor
Het traject van de motion-control-software naar de motor bestaat uit een processor waarop de software draait, gate drivers voor de vermogensschakelaars van de motor en de motor zelf (Afbeelding 1). Er kan ook een traject zijn van een sensor bij de motor terug naar de processor via een analoog front-end. Via deze feedbackloop wordt informatie overgedragen over de positie of snelheid van de motorrotor om de prestaties te bevestigen.
") Afbeelding 1: De motorbesturing begint tegenwoordig met software die als firmware is ingebed in de processor die de gate drivers bestuurt, welke vervolgens de motorwikkelingen voorzien van stroom. Ook kan er een door de sensoren gestuurde feedbackloop bestaan van de motor terug naar de processor. (Bron afbeelding: Renesas)
Afbeelding 1: De motorbesturing begint tegenwoordig met software die als firmware is ingebed in de processor die de gate drivers bestuurt, welke vervolgens de motorwikkelingen voorzien van stroom. Ook kan er een door de sensoren gestuurde feedbackloop bestaan van de motor terug naar de processor. (Bron afbeelding: Renesas)
Ontwerpers hebben twee belangrijke keuzes voor hun DC-gedreven borstelloze motor: de BLDC-motor en de stappenmotor. Beide functioneren door de magnetische wisselwerking tussen interne permanente magneten en het schakelen van elektromagnetische spoelen. De uiteindelijke keuze hangt af van de voor- en nadelen van elke motor met betrekking tot de beoogde toepassing.
Over het algemeen zijn BLDC-motoren zeer betrouwbaar en efficiënt. Ook kunnen zij grote koppels leveren over een groot toerentalbereik. De polen van de stator van de motor worden opeenvolgend onder spanning gezet, waardoor de rotor (met permanente magneten) gaat draaien. BLDC-motoren hebben gewoonlijk drie elektronisch gestuurde stators (Afbeelding 2).
 Afbeelding 2: De stators van de BLDC-motor worden in een zodanige volgorde bekrachtigd dat de rotor (permanente magneet) gaat draaien. (Bron afbeelding: Renesas)
Afbeelding 2: De stators van de BLDC-motor worden in een zodanige volgorde bekrachtigd dat de rotor (permanente magneet) gaat draaien. (Bron afbeelding: Renesas)
De belangrijkste kenmerken van BLDC-motoren zijn reactievermogen, snelle acceleratie, betrouwbaarheid, lange levensduur, geschiktheid voor hoge snelheden en een hoge vermogensdichtheid. Zij worden vaak gebruikt voor toepassingen zoals medische apparatuur, koelventilatoren, snoerloze elektrische gereedschappen, draaitafels en automatiseringsapparatuur.
De stappenmotor werkt op een vergelijkbare manier als de BLDC-motor, behalve dat hij veel kleinere draaibewegingen maakt omdat een volledige omwenteling is verdeeld in een groot aantal kleinere stappen van gelijke hoek (gewoonlijk 128 of 256). In plaats van een continue draaibeweging, wordt de rotor sequentieel aangedreven waardoor hij in kleine stappen draait (Afbeelding 3). Hierdoor kan de rotor nauwkeurig worden gepositioneerd terwijl hij wordt gesynchroniseerd met het magnetische veld dat door de bekrachtigde statorpolen wordt geproduceerd.
 Afbeelding 3: De stappenmotor heeft een groot aantal statorpolen die rond de rotor met permanente magneten zijn aangebracht; door deze polen in een gecontroleerde volgorde van energie te voorzien, draait de rotor en wordt hij over kleine hoeken aangedreven. (Bron afbeelding: Renesas)
Afbeelding 3: De stappenmotor heeft een groot aantal statorpolen die rond de rotor met permanente magneten zijn aangebracht; door deze polen in een gecontroleerde volgorde van energie te voorzien, draait de rotor en wordt hij over kleine hoeken aangedreven. (Bron afbeelding: Renesas)
Stappenmotoren zijn betrouwbaar, nauwkeurig en bieden snelle acceleratie en reactievermogen. Dankzij de stappenregeling en motorconstructie zijn open-loopregeling en positioneringsstabiliteit zelfs voor precisietoepassingen zoals CD-drives, flatbedscanners, printers en plotters, vaak voldoende. Geavanceerde toepassingen kunnen een feedbacksensor en gesloten-loopregeling toevoegen voor extra precisie en prestatiebevestiging.
Opties voor BLDC-motorbesturing
In tegenstelling tot AC-inductiemotoren of DC-borstelmotoren, waarbij de snelheid en het koppel in de eerste plaats worden bestuurd door aanpassing van de voedingsspanning, wordt de BLDC-motor bestuurd door een zorgvuldige timing van het in- en uitschakelen van de vermogensschakelende MOSFET's. Hierdoor kan de motor efficiënt en nauwkeurig voor een grote verscheidenheid aan taken worden toegepast.
De toepassingseisen kunnen variëren, zoals het leveren van een hoog toerental (omwentelingen per minuut) dat nodig is om grote hoeveelheden lucht aan te zuigen in een snoerloze stofzuiger, of een hoog opstartkoppel voor elektrisch gereedschap, vooral als de motor tegen een hoge belasting stopt. In veel toepassingen moet de motor ook geschikt zijn voor grote belastingsvariaties, die een snelle reactietijd vereisen om een constant toerental te behouden.
Er bestaan veelgebruikte strategieën om de BLDC-motor te besturen: eenvoudige 120⁰ aan/uit-regeling en vectorbesturing. Bij een 120⁰ aan/uit-regeling worden twee van de drie spoelen van de BLDC-motor bekrachtigd. Daarnaast worden zes bekrachtigingspatronen in een roterende volgorde geschakeld om de rotatie in beide richtingen te ondersteunen (Afbeelding 4).
") Afbeelding 4: De statorpolen van de BLDC-motor (links) kunnen met de wijzers van de klok mee of tegen de wijzers van de klok in worden bekrachtigd (rechts). De rotor kan dus in beide richtingen worden aangedreven, afhankelijke van de toepassing. (Bron afbeelding: Renesas)
Afbeelding 4: De statorpolen van de BLDC-motor (links) kunnen met de wijzers van de klok mee of tegen de wijzers van de klok in worden bekrachtigd (rechts). De rotor kan dus in beide richtingen worden aangedreven, afhankelijke van de toepassing. (Bron afbeelding: Renesas)
In deze modus worden de statorspoelen bekrachtigd met aan/uit-stroom (een blokgolf), wat resulteert in een trapeziumvormig versnellingsprofiel wanneer de motor op snelheid komt, op snelheid blijft en vervolgens vertraagt wanneer de spoelen worden uitgeschakeld. De voordelen van deze aanpak zijn de inherente eenvoud en de ongecompliceerde bediening.
De techniek is echter gevoelig voor prestatiefluctuaties bij belastings- en andere veranderingen. Bovendien zijn voor sommige toepassingen de nauwkeurigheid en efficiëntie niet hoog genoeg. Geavanceerde algoritmen in de motorbesturing kunnen deze tekortkomingen tot op zekere hoogte ondervangen door de aan/uit-timing van de MOSFET aan te passen én door gebruik te maken van een proportional-integral-derivative (PID) of proportional-integral (PI) besturing.
Een alternatieve techniek die steeds aantrekkelijker wordt, is vectorbesturing, ook wel veldgerichte besturing of field-oriented control (FOC) genoemd. Bij deze aanpak worden alle drie de spoelen bekrachtigd via continue besturing van het roterende magnetische veld, hetgeen resulteert in een soepeler beweging vergeleken met 120graden-besturing. FOC is zo ver ontwikkeld dat het nu wordt gebruikt in veel massaproducten, zoals wasmachines.
Bij FOC wordt de stroom naar elke statorspoel gemeten en bestuurd door geavanceerde algoritmen die complexe numerieke verwerking vereisen. Het algoritme moet ook voortdurend de driefasige AC-waarden omzetten in tweefasige DC-waarden (een proces dat 'coordinate-phase conversion' wordt genoemd), waardoor de daaropvolgende vergelijkingen en berekeningen voor de besturing eenvoudiger worden (Abeelding 5). Het resultaat van FOC, indien goed uitgevoerd, is een zeer nauwkeurige en efficiënte besturing.
 Afbeelding 5: Een deel van het FOC-algoritme vereist 'coordinate-phase conversion' om de complexe numerieke berekeningen te vereenvoudigen. (Bron afbeelding: Renesas)
Afbeelding 5: Een deel van het FOC-algoritme vereist 'coordinate-phase conversion' om de complexe numerieke berekeningen te vereenvoudigen. (Bron afbeelding: Renesas)
Sensoropties voor feedback
BLDC-motoren kunnen worden bestuurd in een open-looptopologie zonder feedbacksignaal of via een gesloten-loopalgoritme met feedback van een sensor bij de motor. De beslissing hangt af van de nauwkeurigheids-, betrouwbaarheids- en veiligheidsoverwegingen van de toepassing.
Het toevoegen van een feedbacksensor verhoogt de kosten en de complexiteit van het algoritme, maar vergroot tevens het vertrouwen in de berekeningen, waardoor het in veel toepassingen essentieel is. De belangrijkste bewegingsparameter is ofwel de rotorpositie of het toerental, afhankelijk van de toepassing. Deze twee factoren zijn nauw met elkaar verbonden: snelheid is de afgeleide van de positie als functie van tijd en positie is de integraal van de snelheid.
Eigenlijk geven bijna alle terugkoppelingssensoren de positie aan waarna de controller hun signalen rechtstreeks kan gebruiken of met behulp van de afgeleide de snelheid kan bepalen. In eenvoudiger gevallen wordt de feedbacksensor gebruikt als veiligheidscontrole van de motorprestaties of een indicator dat de motor is gestopt, en niet zozeer als gesloten-loopregeling.
Er zijn vier typen feedbacksensoren voor algemeen gebruik: Hall-effect-IC's, optische encoders, resolvers en inductiesensoren (Afbeelding 6). Deze bieden allemaal verschillende prestatiekenmerken, resolutie en kosten.
 Afbeelding 6: Gebruikers kunnen kiezen uit een breed scala aan sensoropties als hun systeem een motor-feedbacksignaal nodig heeft, zoals Hall-effect-IC's, encoders, resolvers en inductiesensoren. (Bron afbeelding: Renesas)
Afbeelding 6: Gebruikers kunnen kiezen uit een breed scala aan sensoropties als hun systeem een motor-feedbacksignaal nodig heeft, zoals Hall-effect-IC's, encoders, resolvers en inductiesensoren. (Bron afbeelding: Renesas)
Hall-effect-IC's worden over het algemeen beschouwd als de eenvoudigste en gemakkelijkst te installeren optie en zijn geschikt voor veel verschillende situaties. Optische encoders zijn verkrijgbaar in een reeks resoluties, van laag tot middelhoog, maar zij zijn moeilijk te installeren en kunnen op lange termijn problemen opleveren wat betreft betrouwbaarheid. Resolvers en inductiesensoren zijn groter, zwaarder, duurder en brengen wat interfaceproblemen met zich mee, maar zij bieden zeer hoge resolutie en langetermijnprestaties.
Leveren van de stroom
De polen van borstelloze motoren — ongeacht of het BLDC- of stappenmotoren zijn — zijn elektromagnetische 'spoelen' en moeten dus worden aangedreven door stroom in plaats van spanning. Om deze polen op de juiste wijze van stroom te voorzien, moet het motorbesturingssysteem deze stroom leveren via aan/uit-schakelaars (in de meeste gevallen MOSFET's) met nauwkeurige timing, pulsbreedte en gecontroleerde slew-rates om de motor goed en efficiënt aan te drijven. Deze aandrijving moet de MOSFET's ook beschermen tegen diverse foutcondities, zoals motorstilstand, te hoge stroombehoefte, thermische overbelasting en kortsluiting.
Voor relatief kleine motoren, die gewoonlijk minder dan 500 milliampère (mA) tot één ampère (A) nodig hebben, is het mogelijk de MOSFET-gate drivers en zelfs de MOSFET's te integreren in het motorbesturing-IC, waardoor de voetafdruk zo klein mogelijk wordt gehouden. Hoewel dit handig is en het ontwerp vereenvoudigt, is het in veel gevallen om verschillende redenen geen praktische keuze:
- De halfgeleiderprocessen voor krachtige MOSFET's verschillen sterk van die welke worden gebruikt voor de digitale logica van de controller, zodat het uiteindelijke ontwerp van de combinatie een compromis is (wat echter aanvaardbaar kan zijn).
- Vermogensdissipatie en thermisch beheer van de MOSFET worden grotendeels bepaald door de vermogensbehoeften van de toepassing. Naarmate de stroom- en vermogensniveaus toenemen, kunnen de MOSFET-dissipatie op de chip en de opgewekte warmte al snel de limieten van de behuizing overschrijden. In deze gevallen is het beter om de digitale en vermogensfuncties te scheiden, zodat de ontwerper de plaatsing en het thermische beheer van de MOSFET's kan optimaliseren.
- Tenslotte kan, naarmate de door de motor vereiste stroomniveaus toenemen, de verhoogde IR-gestuurde spanningsval in de motorvoedingskabels een probleem worden. Bijgevolg is het raadzaam de schakelinrichtingen dichter bij de belasting te plaatsen.
Om deze redenen bevatten veel motion control- en motor-IC's alle benodigde functies, behalve de vermogens-MOSFET's. De topologie van de meervoudige MOSFET's wordt vaak een inverterfunctie genoemd. Het gebruik van discrete MOSFET's biedt de ontwerper de flexibiliteit om componenten te kiezen met de juiste combinatie van specificaties voor factoren zoals belastingstroom, 'aan'-weerstand, type behuizing en schakelkarakteristieken.
Geavanceerde IC's gaan uitdagingen aan op het gebied van motorbesturing
In het verleden had men voor geavanceerde motorbesturing een hele reeks IC's nodig. Doorgaans omvatte dit een low-end processor voor algemene commands met een specifieke numerieke co-processor om de nodige algoritmen uit te voeren, of een high-end processor voor beide, samen met de gatedrive-schakelingen voor de vermogenscomponenten. Dit vereiste niet alleen een groter printplaatoppervlak en een langere stuklijst (BOM), maar vaak ook systeemintegratie en daarmee gepaard gaande foutopsporingsproblemen.
De huidige motorbesturings-IC's doen dit echter allemaal in één component, zoals geïllustreerd wordt door de RAJ306010 van Renesas (Afbeelding 7). In de RAJ306010 bevinden zich de vele functionele blokken die specifiek gericht zijn op de unieke behoeften van motorbesturingsontwerpen.
") Afbeelding 7: Het RAJ306010 IC van Renesas heeft de functionaliteit die nodig is voor zeer geavanceerde motorbesturing (met uitzondering van de vermogens-MOSFET's) en neemt dus minder ruimte in dan een oplossing met meerdere IC's, waardoor zowel de BOM als de ontwerpintegratie wordt vereenvoudigd. (Bron afbeelding: Renesas)
Afbeelding 7: Het RAJ306010 IC van Renesas heeft de functionaliteit die nodig is voor zeer geavanceerde motorbesturing (met uitzondering van de vermogens-MOSFET's) en neemt dus minder ruimte in dan een oplossing met meerdere IC's, waardoor zowel de BOM als de ontwerpintegratie wordt vereenvoudigd. (Bron afbeelding: Renesas)
Dit veelzijdige motorbesturings-IC is bedoeld voor driefasige borstelloze DC-motortoepassingen. Het combineert en integreert twee ongelijksoortige functies in een piepklein 8 × 8 millimeter (mm), 64-lead QFN-behuizing: de digitale controllerfunctie en de grotendeels analoge pre-driverfunctie. Het IC werkt bij een voeding van 6 tot 24 volt en richt zich op standalone, grotendeels autonome toepassingen zoals elektrisch gereedschap, tuingereedschap, stofzuigers, printers, ventilatoren, pompen en robotica. (Merk op dat de overigens vrijwel identieke RAJ306001 voor 6 tot 30 volt hetzelfde gegevensblad heeft als de RAJ306010.)
Aan de digitale zijde bevat de RAJ306010 een 16-bits microcontroller (Renesas klasse RL78/G1F), ondersteund door 64 kilobyte (Kbyte) flash-ROM, 4 Kbyte dataflash-ROM en 5,5 Kbyte RAM. Bovendien is er een aanzienlijke hoeveelheid digitale I/O: GPIO (general purpose I/O), SPI, I2C en een UART. Ook is er een negenkanaals, 10-bits analoog-digitaal omzetter (ADC) voor analoge signalen naar het component.
Om de RAJ306010 te gebruiken, laadt de systeemontwerper de gewenste werkingsparameters in de passende flashgeheugencontroleregisters om de gewenste werkingsmodi en -voorwaarden vast te stellen. Het IC is dan klaar en werkt bij inschakelen zonder dat er een extra microcontroller nodig is, zoals te zien is in dit high-level systeemblokschema van een typische toepassing (Afbeelding 8).
 Afbeelding 8: Dit high-level systeemblokschema van een basistoepassing die gebruik maakt van de RAJ306001 laat zien hoe het hoge integratieniveau de behoefte aan bijkomende discrete componenten minimaliseert. (Bron afbeelding: Renesas)
Afbeelding 8: Dit high-level systeemblokschema van een basistoepassing die gebruik maakt van de RAJ306001 laat zien hoe het hoge integratieniveau de behoefte aan bijkomende discrete componenten minimaliseert. (Bron afbeelding: Renesas)
De analoge zijde van de RAJ306010 is voorzien van drie halvebrug gate drivers met een instelbare gate-drive piekstroom tot 500 mA, een zelfuitlijnende dead-time generatorfunctie om 'shoot-through' van de brug en schade te voorkomen, een stroomdetectieversterker en een back-EMF versterker. Een integrale laadpomp verhoogt de geleverde gate-drive tot 13 volt bij een lagere voedingsspanning.
Voor Hall-effectsensoren bestaat directe ondersteuning en de analoge front-end (AFE) kan ook worden gebruikt om andere soorten feedbacksensoren te ondersteunen. Net als bij alle goed ontworpen motorbesturingen zijn er functies zoals bescherming tegen te hoge temperatuur, over-/onderspanning lockout (UVLO), overstroomdetectie en bescherming tegen motorbloktoestanden.
Het voorbeeld in Afbeelding 9 toont hoe de RAJ306010 gemakkelijk gebruikt kan worden voor een standalone basistoepassing zoals een 24 volt snoerloze blender of een ander vergelijkbaar apparaat. Merk op dat het grootste deel van de schakeling gewijd is aan het opladen en beheren van de achtcellige accu, terwijl voor de motorbesturing alleen het besturings-IC, de externe driefasebrug (omvormer), een feedback-spanningsdetectieschakeling (via een stroomdetectieweerstand), en de 'start'-knop van de gebruiker nodig zijn.
") Afbeelding 9: Het hoge niveau van functionele integratie van de RAJ306010 laat duidelijk zien hoe weinig extra schakelingen en extra componenten er nodig zijn voor de motorbesturingsfunctie voor een eenvoudig apparaat, zoals deze op batterijen werkende blender. (Bron afbeelding: Renesas)
Afbeelding 9: Het hoge niveau van functionele integratie van de RAJ306010 laat duidelijk zien hoe weinig extra schakelingen en extra componenten er nodig zijn voor de motorbesturingsfunctie voor een eenvoudig apparaat, zoals deze op batterijen werkende blender. (Bron afbeelding: Renesas)
Aan de slag met BLDC-motorbesturing
Het plannen, simuleren, evalueren en aanpassen van een motorbesturingstoepassing 'op papier' of op een pc met behulp van verschillende modellen van het totale systeem is één ding. Een echte motor laten draaien en de prestaties testen met echte componenten, echte belastingen en echte dynamiek is echter iets heel anders, evenals het effect van de aanvankelijke startvoorwaarden en veranderingen op de verschillende prestatieparameters.
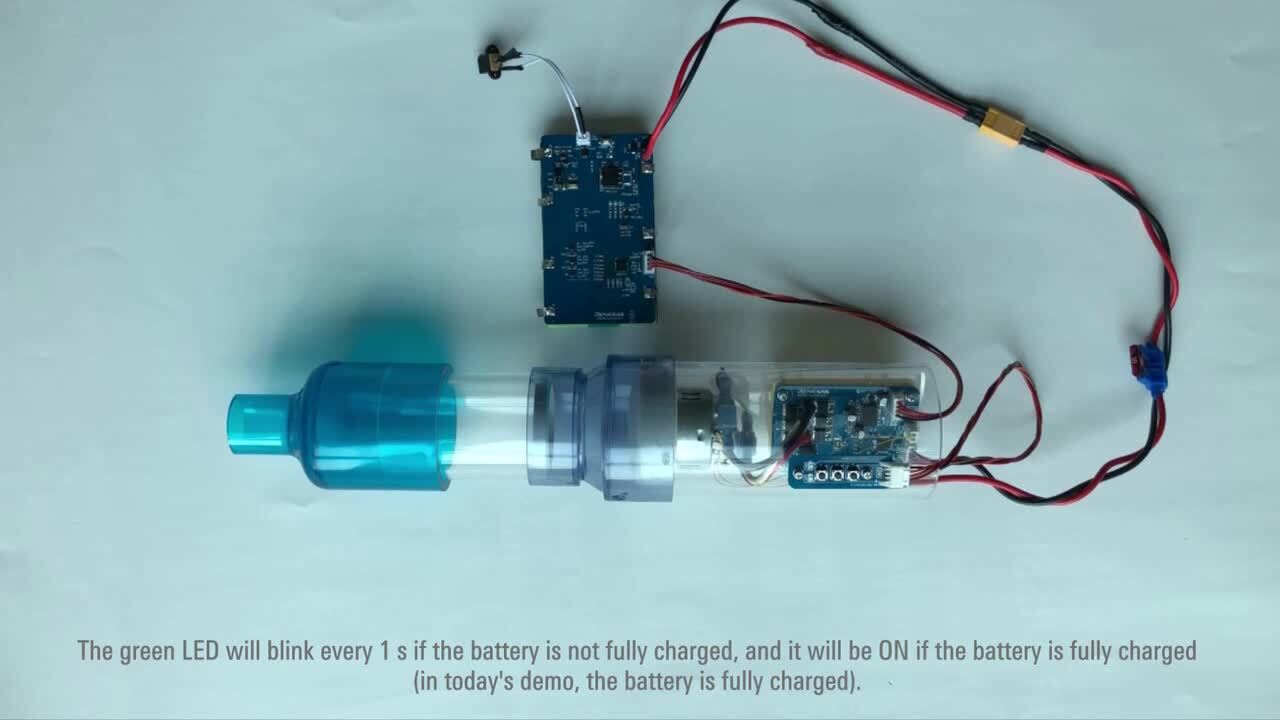
Daarom is het RTK0EML2C0S01020BJ evaluatiesysteem van Renesas voor motorbesturing (Afbeelding 10) een belangrijke aanwinst voor de ontwerper, samen met de Renesas Motor Workbench voor eenvoudige foutopsporing. Deze softwaretool stelt de ontwerper in staat vertrouwd te raken met de werking van de RAJ306010, de in- en uitgangsmodi en de functies van de diverse controleregisters.
 Afbeelding 10: Deze printplaat vormt de kern van het RTK0EML2C0S01020BJ evaluatiesysteem van Renesas voor motorbesturing en versnelt samen met de Renesas Motor Workbench-software de fijnafstelling van parameters en evaluatie van de motorprestaties bij gebruik van het motorbesturings-IC RAJ306010. (Bron afbeelding: Renesas)
Afbeelding 10: Deze printplaat vormt de kern van het RTK0EML2C0S01020BJ evaluatiesysteem van Renesas voor motorbesturing en versnelt samen met de Renesas Motor Workbench-software de fijnafstelling van parameters en evaluatie van de motorprestaties bij gebruik van het motorbesturings-IC RAJ306010. (Bron afbeelding: Renesas)
Om nog sneller met de productontwikkelingsfase te kunnen beginnen, omvat het evaluatiesysteem een 24 volt/420 mA BLDC-motor met een onbelast toerental van 3900 omw/min en een nominaal koppel van 19,6 millinewton-meter (mN-m) (gelijk aan 200 gram-force centimeter). Verder levert Renesas voorbeeldroutines van softwarebesturingen voor zowel sensorloze als sensorgebaseerde besturing.
Conclusie
Ontwerpers die gelijkstroommotoren in hun systemen inbouwen, hebben veel meer opties dan alleen de klassieke gelijkstroommotoren met borstels. Er zijn namelijk krachtige, kosteneffectieve BLDC-motoren beschikbaar die vermogen en precisie in een kleine behuizing bieden. Om het potentieel van deze BLDC-motoren ten volle te benutten, worden in slimme regelaars de nodige algoritmen ingebouwd en geïmplementeerd met de gewenste parameters van de gebruiker. Zij leveren ook de noodzakelijke aandrijving voor de schakelende MOSFET's van de motor en andere analoge I/O's voor een complete motorbesturingsoplossing.
Zoals we hebben laten zien, kunnen IC's zoals de RAJ306010 van Renesas, samen met ontwikkelingssets en software, de ontwerpuitdaging om motoren met hoge prestaties, kleine afmetingen en efficiënte besturing te leveren voor huishoudelijke apparaten, autostoelen, ramen en vele andere gangbare toepassingen, aanzienlijk vereenvoudigen.
Referenties
- BLDC Motor Control Algorithms
- RTK0EML2C0S01020BJ BLDC Motor Control Evaluation System for RAJ3060xx Motor Control ICs
- Application Note R01AN3786EJ0102, “Sensorless Vector Control for Permanent Magnet Synchronous Motor (Algorithm)”
- Portable Power Tools Solution
- 24V Cordless Blender
- Motor Solutions: User-Friendly Motor Control Development Environment to Shorten Time to Market
Disclaimer: The opinions, beliefs, and viewpoints expressed by the various authors and/or forum participants on this website do not necessarily reflect the opinions, beliefs, and viewpoints of DigiKey or official policies of DigiKey.