Hoe snel GNSS-modules met meerdere constellaties voor positiebepaling implementeren
Bijgedragen door De Noord-Amerikaanse redacteurs van DigiKey
2021-09-09
Het gebruik van positiegebaseerde functies met behulp van GNSS-ontvangers (Global Navigation Satellite System) met meerdere constellaties voor Europa's Galileo, het Amerikaanse Global Positioning System (GPS), Rusland's GLONASS, China's BeiDou navigatiesatellietsysteem en Japan's QZSS neemt toe in een reeks toepassingen, waaronder robotica, autonome voertuigen, industriële automatisering, logistiek en het volgen van goederen, drones, en landbouw- en zware constructieapparatuur. De voordelen van het gebruik van GNSS-ontvangers met meervoudige constellatie zijn onder meer: betere beschikbaarheid van de positie-, navigatie- en tijdsbepalingssignalen (PNT), grotere nauwkeurigheid en integriteit, en betere robuustheid van de toepassing.
Maar het ontwikkelen van multi-constellatie-ontvangers is een complexe en tijdrovende bezigheid die het volgende omvat: optimalisering van de L-band antenne; ontwerp van het radiofrequentie (RF) front-end; integratie van de basisband signaalverwerkingsalgoritmen voor het verwerven, volgen en toepassen van correcties op de verschillende PNT-signalen; codering van de verwerkingssoftware van de toepassing om PNT-gegevens uit elk kanaal van de basisband te extraheren en de informatie te gebruiken om systeemfuncties uit te voeren. De ontwerpers moeten ook een geschikte antenne kiezen en deze correct plaatsen.
Als alternatief kunnen ontwerpers gebruik maken van kant-en-klare GNSS-modules en ontwikkelingsomgevingen om snel en efficiënt plaatsbepalingsmogelijkheden in een systeem te integreren. Deze GNSS-modules omvatten het RF-front-end, de basisbandverwerking en de ingebedde firmware om de ontwikkeling van software voor de verwerking van toepassingen te versnellen. Sommige GNSS-modules omvatten ook de antennes.
Dit artikel behandelt de basisprincipes van GNSS, PNT en de werking van GNSS-ontvangers met meerdere constellaties. Vervolgens worden de voor- en nadelen van de integratie van antennes in GNSS-modules besproken, waarna verschillende GNSS-modules - met en zonder geïntegreerde antennes - en bijbehorende evaluatiekaarten van STMicroelectronics, Septentrio en Würth Elektronik worden voorgesteld die ontwerpers kunnen gebruiken voor de efficiënte en kosteneffectieve ontwikkeling van nauwkeurige en robuuste positiegebaseerde toepassingen.
Wat zijn GNSS en PNT?
GNSS en PNT zijn nauw verwante concepten. GNSS-satellieten zijn de meest voorkomende bron van PNT-signalen. GNSS-satellieten zijn in wezen zeer nauwkeurige gesynchroniseerde klokken die voortdurend hun PNT-informatie uitzenden. Een GNSS-module ontvangt PNT-signalen van een bepaalde satelliet en berekent de afstand tot die satelliet. Wanneer de ontvanger de afstand tot ten minste vier satellieten kent, kan hij zijn eigen positie schatten. De nauwkeurigheid van de positiebepaling wordt echter beïnvloed door een groot aantal foutenbronnen, waaronder:
- Klokdrift van de tijdwaarnemingsschakelingen in GNSS-satellieten
- Onnauwkeurigheden in de voorspelling van de exacte baanpositie van GNSS-satellieten
- Algemene afwijking van de prestaties van de totale satellietapparatuur ten opzichte van andere satellieten, ook wel satellietvertekeningen genoemd
- Vervormingen en vertragingen in de signaaloverdracht bij passage door de ionosfeer en de troposfeer.
- Multipathreflectie en variabele prestaties en drift in de ontvanger
Er zijn verschillende technieken beschikbaar voor ontwerpers om te corrigeren voor satellietgebaseerde en atmosferische GNSS-fouten.
Verbetering van de GNSS-prestaties
De beste manier om het effect van fouten die hun oorsprong vinden in de GNSS-ontvanger te minimaliseren is gebruik te maken van de ontvanger met de beste prestaties die binnen de kosten- en omvangsgrenzen van een bepaalde toepassing past. Maar zelfs krachtige ontvangers zijn niet perfect; hun prestaties kunnen zeer waarschijnlijk worden verbeterd. Het is belangrijk deze correctiemethoden te begrijpen, aangezien de prestaties ervan variëren en sommige GNSS-modules niet in staat zijn ze allemaal toe te passen.
Referentiestations op de grond worden door verschillende GNSS-correctiemethoden gebruikt (Afbeelding 1). De meest gevestigde methoden voor het gebruik van referentiestations op de grond om GNSS-correcties aan ontvangers te leveren zijn Real-Time Kinematic (RTK) en Precise Point Positioning (PPP). Meer recentelijk zijn hybride RTK-PPP-methoden beschikbaar gekomen.
 Afbeelding 1: Een GNSS-ontvanger voor gebruikers kan informatie over atmosfeer-, klok- en baanfouten uit een referentienetwerk halen om de nauwkeurigheid van de plaatsbepaling te verbeteren. (Bron afbeelding: Septentrio)
Afbeelding 1: Een GNSS-ontvanger voor gebruikers kan informatie over atmosfeer-, klok- en baanfouten uit een referentienetwerk halen om de nauwkeurigheid van de plaatsbepaling te verbeteren. (Bron afbeelding: Septentrio)
RTK vertrouwt op één basisstation of een lokaal referentienetwerk voor correctiegegevens die de meeste GNSS-fouten kunnen elimineren. RTK gaat ervan uit dat het basisstation en de ontvanger dicht bij elkaar staan - maximaal 40 kilometer (km) uit elkaar - zodat zij dezelfde fouten ondervinden. Post-Processed Kinematic of PPK is een variatie op RTK en wordt veel gebruikt bij landmeetkunde en kartering om uiterst nauwkeurige plaatsbepalingsgegevens of een nauwkeurigheid op centimeters te verkrijgen.
Alleen fouten in de baan en de satellietklok worden gebruikt om PPP-correcties uit te voeren. Deze satelliet-specifieke fouten zijn onafhankelijk van de locatie van de gebruiker, hetgeen het aantal benodigde referentiestations beperkt. PPP houdt echter geen rekening met atmosferische fouten en is daarom minder nauwkeurig dan RTK. Bovendien kunnen PPP-correcties een initialisatietijd van ongeveer 20 minuten hebben. De langere initialisatietijd en de geringere nauwkeurigheid maken PPP voor veel toepassingen onpraktisch.
Voor toepassingen die een bijna RTK-nauwkeurigheid en snelle initialiseringstijden vereisen, wordt vaak gebruik gemaakt van de nieuwste GNSS-correctiedienst, RTK-PPP (soms aangeduid als state-space representation (SSR)). Het maakt gebruik van een referentienetwerk met stations op een onderlinge afstand van ongeveer 100 km (65 mijl) dat GNSS-gegevens verzamelt en een combinatie van satelliet- en atmosferische correcties berekent. Het referentienetwerk maakt gebruik van internet-, satelliet- of mobiele telefoonnetwerken om de correctiegegevens naar de abonnees te zenden. GNSS-ontvangers die RTK-PPP gebruiken, kunnen een nauwkeurigheid van minder dan een decimeter hebben. De keuze voor RTK-, PPP- en RTK-PPP-correctiemethoden impliceert een reeks compromissen in het ontwerp die de ontwikkelaars moeten beoordelen om de optimale oplossing voor het specifieke toepassingsprofiel te kiezen. (Afbeelding 2).
 Afbeelding 2: Sterke en zwakke punten van drie gangbare GNSS-correctiemethoden. (Bron afbeelding: Septentrio)
Afbeelding 2: Sterke en zwakke punten van drie gangbare GNSS-correctiemethoden. (Bron afbeelding: Septentrio)
Op satellieten gebaseerde augmentatiesystemen (SBAS) beginnen op regionale basis beschikbaar te komen ter vervanging van de op grondstations gebaseerde correctiemethoden RTK, PPP, en RTK-PPP. SBAS maakt nog steeds gebruik van grondstations om GNSS-fouten te meten, maar de stations zijn over hele continenten verspreid. De gemeten fouten worden verwerkt op een centrale plaats waar de correcties worden berekend en doorgezonden naar geosynchrone satellieten over het bestreken gebied. De correctiegegevens worden door de satellieten uitgezonden als een overlay of een aanvulling op de oorspronkelijke GNSS-gegevens.
De nauwkeurigheid van GNSS hangt af van de beschikbaarheid en de nauwkeurigheid van satellietmetingen en bijbehorende correcties. Hoogwaardige GNSS-ontvangers volgen GNSS-signalen op meerdere frequenties en maken gebruik van meerdere GNSS-constellaties en diverse correctiemethoden om de vereiste nauwkeurigheid en veerkracht te leveren. De resulterende redundantie maakt stabiele prestaties mogelijk, zelfs als sommige van de satellietmetingen en -gegevens storing ondervinden. Ontwerpers kunnen kiezen uit verschillende GNSS-nauwkeurigheids- en redundantiecapaciteiten (Afbeelding 3).
 Afbeelding 3: GNSS-nauwkeurigheidsgraden met overeenkomstige correctiemethoden en geselecteerde toepassingen. (Bron afbeelding: Septentrio)
Afbeelding 3: GNSS-nauwkeurigheidsgraden met overeenkomstige correctiemethoden en geselecteerde toepassingen. (Bron afbeelding: Septentrio)
GNSS-modules: geïntegreerde vs. externe antennes
Gezien de complexiteit van multi-constellatie positionering zijn er van diverse leveranciers modules verkrijgbaar die helpen de time-to-market te versnellen, de kosten te verlagen en de prestaties te garanderen. Ontwerpers moeten echter overwegen of zij een interne antenne gebruiken of in plaats daarvan kiezen voor een antenne die zich buiten de GNSS-module bevindt. Voor toepassingen waarbij tijd tot marktintroductie en kosten een prioriteit zijn, kan een geïntegreerde antenne de voorkeur verdienen, aangezien er aanzienlijk minder engineering aan te pas komt. Voor toepassingen die FCC- of CE-certificering behoeven, kan het gebruik van een module met een geïntegreerde antenne ook het goedkeuringsproces versnellen. De omvang van de oplossing kan echter toenemen, en de flexibiliteit kan beperkt zijn bij geïntegreerde antenneoplossingen.
Externe antennes bieden ontwerpers een breder scala aan prestatie- en lay-outopties. Er kan worden gekozen voor een grote antenne met hoge prestaties of voor een kleinere antenne met lagere prestaties. Bovendien is de plaatsing van de antenne flexibeler ten opzichte van de locatie van de GNSS-module, wat de ontwerpflexibiliteit nog vergroot. Flexibele plaatsing maakt het ook mogelijk externe antennes te plaatsen voor een betrouwbaardere GNSS-werking. Het plaatsen van antennes en het leggen van verbindingen kan echter een ingewikkeld en tijdrovend proces zijn en vereist specifieke deskundigheid, waardoor de kosten kunnen oplopen en de tijd om een product op de markt te brengen wordt vertraagd.
Kleine GNSS-module voor ontwerpen met beperkte ruimte
Ontwerpteams met de vereiste deskundigheid op het gebied van plaatsing en routing van antennes kunnen gebruik maken van de Teseo-LIV3F van STMicroelectronics, een GNSS-module met meerdere constellaties (GPS/Galileo/GLONASS/BeiDou/QZSS) die gebruik maakt van een externe antenne (Afbeelding 4). De module wordt geleverd in een LCC-18 pakket van 9,7 mm x 10,1 mm, en biedt 1,5 meter (m) circulaire fout waarschijnlijke (CEP) positienauwkeurigheid, met een tijd tot eerste fix (TTFF) voor koude en warme start zo laag als minder dan 32 seconden (s) en minder dan 1,5 s, respectievelijk (GPS, GLONASS). Hij heeft een stand-by stroomverbruik van 17 microwatt (µW) en een volgstroomverbruik van 75 milliwatt (mW).
 Afbeelding 4: De Tesco-LIV3F GNSS-module omvat de GNSS-kern en -subsystemen, plus alle vereiste connectiviteit en voedingsbeheer, in een pakket van 9,7 x 10,1 mm. Er is een externe antenne nodig. (Bron afbeelding: STMicroelectronics)
Afbeelding 4: De Tesco-LIV3F GNSS-module omvat de GNSS-kern en -subsystemen, plus alle vereiste connectiviteit en voedingsbeheer, in een pakket van 9,7 x 10,1 mm. Er is een externe antenne nodig. (Bron afbeelding: STMicroelectronics)
De ingebouwde 26-megahertz (MHz) temperatuurgecompenseerde kristaloscillator (TCXO) van de Tesco-LIV3F zorgt voor een hoge nauwkeurigheid, en de speciale 32 kilohertz (kHz) real-time klok (RTC) oscillator zorgt voor een kortere tijd tot de eerste fixatie (TTFF). Functies zoals datalogging, zeven dagen autonoom geassisteerd GNSS, herconfigureerbaarheid van firmware (FW), alsmede FW-upgrades, worden mogelijk gemaakt door het 16 megabit (Mbit) ingebedde flashgeheugen.
Toepassingen die geschikt zijn voor de Tesco-LIV3F zijn onder meer verzekeringen, logistiek, drones, tolheffing, anti-diefstalsystemen, het lokaliseren van mensen en huisdieren, het volgen van voertuigen, en noodoproepen.
Als een vooraf gecertificeerde oplossing kan het gebruik van de Teseo-LIV3F module resulteren in een verkorte doorlooptijd van de uiteindelijke toepassing. Het heeft een bedrijfstemperatuurbereik van -40 °C tot +85 °C.
Om met de module te experimenteren en de ontwikkeling van toepassingen te versnellen, kunnen ontwerpers gebruik maken van het AEK-COM-GNSST31-evaluatiebord. Wanneer het evaluatiepakket wordt gebruikt in combinatie met de X-CUBE-GNSS1-firmware, kan het acquisitie-, tracking-, navigatie- en gegevensuitvoerfunctionaliteit ondersteunen zonder extern geheugen. Deze EVB is ook ontworpen voor gebruik met een SPC5-microcontroller voor de ontwikkeling van automotive toepassingen.
GNSS-module met onderdrukking van interferentie
Septentrio's 410322 mozaïek-X5 multi-constellatie GNSS ontvanger is een low-power, surface-mount module met afmetingen van 31 mm x 31 mm x 4 mm die ontwerpers voorziet van een reeks interfaces, waaronder vier UARTs, Ethernet, USB, SDIO, en twee door de gebruiker programmeerbare GPIOs.
De mozaïek-X5 is ontworpen voor gebruik in robotica, autonome systemen en andere massatoepassingen en heeft een updatefrequentie van 100 Hertz (Hz), een latentie van minder dan 10 milliseconden (ms) en een verticale en horizontale RTK-positioneringsnauwkeurigheid van respectievelijk 0,6 cm en 1 cm. Hij kan alle GNSS-constellaties volgen, ondersteunt huidige en toekomstige signalen, en is compatibel met PPP-, SSR-, RTK- en SBAS-correcties. De TTFF van de module is minder dan 45 s koude start en minder dan 20 s warme start.
De Mozaïek-X5 is uitgerust met verschillende Septentrio gepatenteerde technologieën, waaronder AIM+, een ingebouwde technologie om interferenties te onderdrukken, van eenvoudige continue smalbandsignalen tot complexe breedband- en pulsgestuurde stoorzenders.
De interfaces, commando's en gegevensberichten van de modules zijn volledig gedocumenteerd. Met de meegeleverde RxTools-software kan de ontvanger worden geconfigureerd en bewaakt, en kunnen gegevens worden vastgelegd en geanalyseerd.
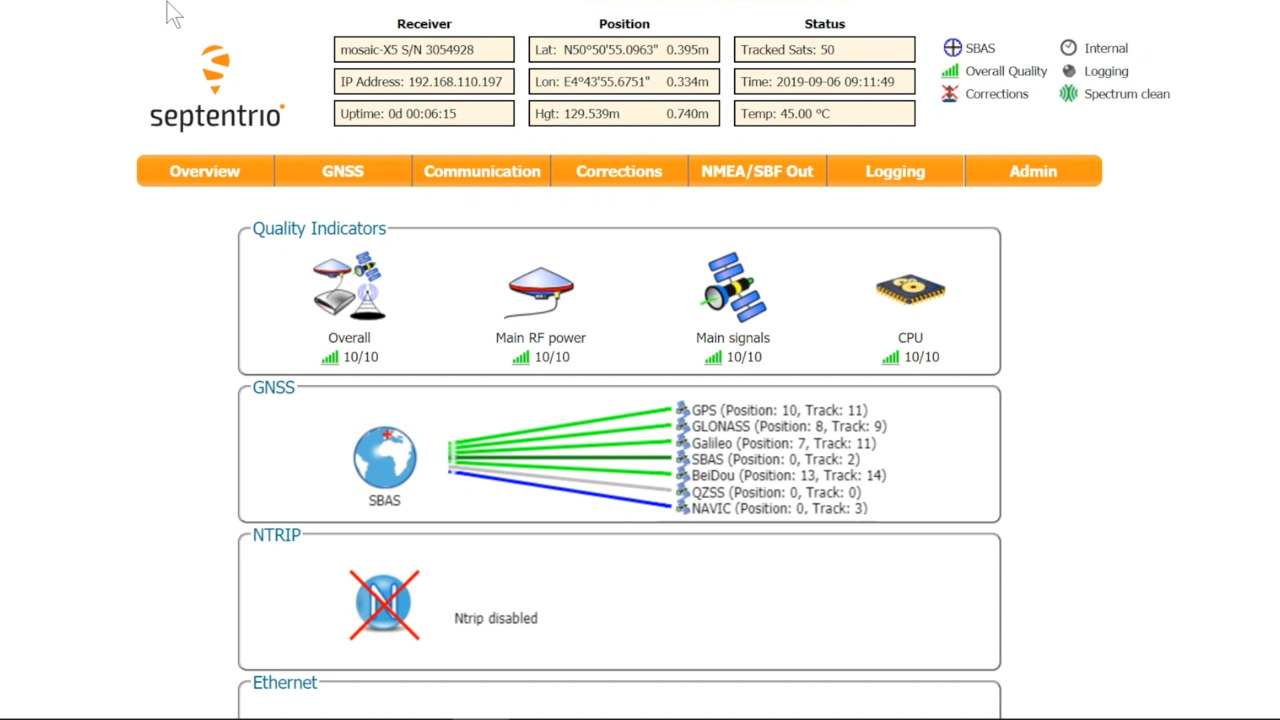
Met Septentrio's 410331P3161 mozaïek-X5 ontwikkelingskit kunnen ontwerpers prototypes onderzoeken, evalueren en ontwikkelen die de mogelijkheden van de mozaïek-X5 ten volle benutten (Afbeelding 5).
 Afbeelding 5: Ontwerpers kunnen een prototype maken met de 410331P3161 Mosaic-X5-ontwikkelingskit door gebruik te maken van een verscheidenheid aan aansluitingen, waaronder Ethernet, COM-poorten of USB 2.0, of door gebruik te maken van een SD-geheugenkaart. (Bron afbeelding: Septentrio)
Afbeelding 5: Ontwerpers kunnen een prototype maken met de 410331P3161 Mosaic-X5-ontwikkelingskit door gebruik te maken van een verscheidenheid aan aansluitingen, waaronder Ethernet, COM-poorten of USB 2.0, of door gebruik te maken van een SD-geheugenkaart. (Bron afbeelding: Septentrio)
De kit maakt gebruik van de intuïtieve webinterface van de Mozaïek-X5 voor eenvoudige bediening en controle, zodat ontwerpers de ontvangermodule vanaf elk mobiel toestel of computer kunnen bedienen. De webinterface maakt gebruik van gemakkelijk af te lezen kwaliteitsindicatoren om de werking van de ontvanger te controleren.
Ontwerpers kunnen een prototype maken door de Mosaic dev-kit te integreren met behulp van een van de volgende aansluitingen: Ethernet, COM-poorten, USB 2.0, SD-geheugenkaart.
GNSS-module met geïntegreerde antenne
Voor ontwerpers van toepassingen die baat kunnen hebben bij het gebruik van een GNSS-module met een geïntegreerde antenne, biedt Würth Elektronik de 2614011037000 Erinome-I module met een krachtig systeem-op-chip (SoC) (Afbeelding 6). De module ondersteunt de GNSS-constellaties GPS, GLONASS, Galileo en BeiDou, en wordt geleverd met een geïntegreerde antenne bovenop die de hardware-integratie vereenvoudigt en de doorlooptijd verkort. De module, inclusief de geïntegreerde antenne, meet 18 mm x 18 mm.
 Afbeelding 6: De 2614011037000 Erinome-I is een complete GNSS-module met een krachtige GNSS SoC plus een geïntegreerde antenne. (Bron afbeelding: Würth Elektronik)
Afbeelding 6: De 2614011037000 Erinome-I is een complete GNSS-module met een krachtige GNSS SoC plus een geïntegreerde antenne. (Bron afbeelding: Würth Elektronik)
De module bevat ook een TCXO, een RF-filter, een ruisarme versterker (LNA) en een serieel flash-geheugen.
Würth biedt ook de 2614019037001-evaluatiekaart (EVB) voor de Erinome-I (Afbeelding 7). De EVB kan ook dienen als referentieontwerp voor de integratie van de GNSS-module in een toepassing. Een USB-poort kan worden gebruikt om de EVB op een PC aan te sluiten. Een multipen-connector geeft ontwerpers toegang tot alle pennen van de GNSS module.
 Afbeelding 7: Het 2614019037001-evaluatiebord voor de Erinome-I (in het midden van het bord, met de geïntegreerde antenne zichtbaar in het midden van de module) fungeert ook als referentieontwerp. (Bron afbeelding: Würth Elektronik)
Afbeelding 7: Het 2614019037001-evaluatiebord voor de Erinome-I (in het midden van het bord, met de geïntegreerde antenne zichtbaar in het midden van de module) fungeert ook als referentieontwerp. (Bron afbeelding: Würth Elektronik)
Würth Elektronik Navigation and Satellite Software (WENSS) is een eenvoudig PC-hulpprogramma voor interactie met de Erinome-I GNSS-module met behulp van de UART-interface. Het ondersteunt:
- Controle van de EVB-werking
- Bidirectionele communicatie met de Erinome-I module
- Evaluatie van de kenmerken en mogelijkheden van Erinome-I
- Vertrouwd raken met Erinome-I protocollen, zinnen, en commando's
- Configuratie van de Erinome-I zonder kennis van de protocollen
- Parsing van zinnen en commando's gebruikt door de Erinome-I
WENSS maakt een eenvoudige evaluatie van positioneringstoepassingen mogelijk zonder geavanceerde kennis. Ervaren ontwikkelaars kunnen WENSS ook gebruiken voor meer geavanceerde configuraties.
Conclusie
Nauwkeurige en betrouwbare plaatsbepaling wordt het best bereikt door gebruik te maken van meerdere constellaties met bijbehorende ondersteuning door correctietechnologie. Dit zijn complexe systemen, maar ontwerpers kunnen een beroep doen op kant-en-klare GNSS-modules, bijbehorende ontwikkelingskits en omgevingen om snel en efficiënt opties te vergelijken en op positie gebaseerde functies en diensten te implementeren.
Aanbevolen leesmateriaal
Disclaimer: The opinions, beliefs, and viewpoints expressed by the various authors and/or forum participants on this website do not necessarily reflect the opinions, beliefs, and viewpoints of DigiKey or official policies of DigiKey.