De integratie van GaN-vermogenstrappen voor efficiënte aandrijfsystemen met BLDC-motors op batterijen
2023-02-22
Toepassingen op batterijen zoals collaboratieve robots (cobots), elektrische fietsen, industriële drones en elektrisch gereedschap vereisen lichte en krachtige elektrische motors met een kleine vormfactor. Borstelloze gelijkstroommotors (BLDC) zijn een goede optie, maar de elektronica van de motoraandrijving is vrij complex met veel ontwerpoverwegingen. De ontwerper moet het koppel, de snelheid en de positie strak regelen, en tegelijk zorgen voor een hoge precisie met een minimum aan trillingen, lawaai en elektromagnetische straling (EMR). Bovendien moeten omvangrijke koellichamen en externe kabelbomen worden vermeden om gewicht, ruimte en kosten te besparen.
Zoals vaak het geval is, wordt de uitdaging voor ontwerpers er een van het in evenwicht brengen van ontwerpvereisten met de druk van tijd en budget - terwijl dure ontwikkelingsfouten worden vermeden. Een manier om dit te doen is gebruik te maken van snelle halfgeleidertechnologieën met laag verlies, zoals galliumnitride (GaN), voor de vermogenstrappen die nodig zijn om de BLDC-motors aan te drijven.
Dit artikel bespreekt de relatieve voordelen van op GaN gebaseerde vermogenstrappen en introduceert een voorbeeldapparaat van EPC, geïmplementeerd in een halfbrugtopologie. Het legt uit hoe geassocieerde ontwikkelingskits kunnen worden gebruikt om snel met een project te beginnen. In het proces zullen ontwerpers leren hoe ze de parameters van een BLDC-motor kunnen meten en deze met minimale programmeringsinspanning kunnen bedienen met sensorloze veldoriëntatiecontrole (FOC) met behulp van de MotorBench Development Suite van Microchip Technology.
De voordelen van GaN
Om een BLDC-motor in batterijtoepassingen efficiënt aan te sturen, hebben ontwikkelaars een efficiënte, lichte stuurtrap met een kleine vormfactor nodig die zo dicht mogelijk bij de actuator kan worden geïmplementeerd. Bijvoorbeeld in het motorhuis.
Bipolaire transistors met geïsoleerde poort (IGBT's) zijn robuust en kunnen hoge vermogens schakelen tot 100 megawatt (MW) bij een maximum van 200 kilohertz (kHz), maar zijn niet geschikt voor apparaten die batterijlading moeten beheren bij spanningen tot 80 volt. De hoge contactweerstand, de vrijloopdiode en de schakelverliezen, alsmede de stroomstaart tijdens het uitschakelen, leiden samen tot signaalvervorming, overmatige warmteontwikkeling en ongewenste emissies.
Metaaloxide-halfgeleider-veldeffecttransistors (MOSFET's) schakelen sneller en hebben lagere schakel- en ohmse verliezen dan IGBT's, maar hun poortcapaciteit vereist een krachtige gatedriver om bij hoge schakelfrequenties te kunnen werken. Kunnen werken bij hoge frequenties is belangrijk omdat ontwerpers dan kleinere elektronische componenten kunnen gebruiken om de totale benodigde ruimte te beperken.
GaN-transistors met hoge elektronenmobiliteit (HEMT's) kunnen dankzij hun hoge draaggolf uiterst snel en met lage verliezen halfgeleiderverbindingen opbouwen en afbreken. Een geïntegreerde GaN-driver, zoals EPC's EPC23102ENGRT, heeft uitzonderlijk lage schakelverliezen en hoge schakelfrequenties, waardoor compacte apparaatontwerpen in de kleinste ruimtes mogelijk zijn. De monolithische chip bevat een input logic interface met level shifters, bootstrap loading, en gate driver circuits die de GaN output FET's aansturen in een halfbrugtopologie (Afbeelding 1). Het chippakket is geoptimaliseerd voor hoge warmteafvoer en lage parasitaire inductie.
") Afbeelding 1: De EPC23102 bevat besturingslogica, levelshifters, gatedrivers en GaN uitgangs-FET's in een halfbrugtopologie (links). De chipverpakking (rechts) is geoptimaliseerd voor hoge warmteafvoer en lage parasitaire inductie. (Bron afbeelding: EPC)
Afbeelding 1: De EPC23102 bevat besturingslogica, levelshifters, gatedrivers en GaN uitgangs-FET's in een halfbrugtopologie (links). De chipverpakking (rechts) is geoptimaliseerd voor hoge warmteafvoer en lage parasitaire inductie. (Bron afbeelding: EPC)
Minder afvalwarmte en lagere EMR
De EPC23102-uitgangstransistors hebben een typische drain-bron aan-weerstand (RDS(on)) van 5,2 milliohms (mΩ) (bij 25 °C). Zij verwerken spanningen tot 100 volt en stromen tot maximaal 35 ampère (A). Bovendien zorgen de laterale structuur van het GaN-apparaat en de afwezigheid van een intrinsieke lichaamsdiode voor een uitzonderlijk lage poortlading (QG) en omgekeerde recuperatielading (QRR).
Vergeleken met een MOSFET met een vergelijkbare RDS(on), bereikt de GaN-driver tot vijf keer lagere schakelverliezen. Hierdoor kan een op GaN gebaseerde inverter werken bij relatief hoge pulsbreedtemodulatiefrequenties (PWM) - tot 3 megahertz (MHz) - en met een kortere dode tijd (minder dan 50 nanoseconden (ns)).
Hoge schakelsnelheden (dV/dt) en de lage temperatuurcoëfficiënt van GaN-halfgeleiders in een pakketontwerp met verminderde parasitaire inductantie minimaliseren signaalvervorming, en dus EMR en schakelverliezen. Dit vermindert de behoefte aan filterstrategieën, terwijl de kleinere goedkope condensators en spoelen ruimte op de printplaat besparen.
Samen met de lage contactweerstand RDS(on), combineren de andere voordelen van het GaN-apparaat, zoals de hoge thermische geleidbaarheid van het GaN-substraat en het grote thermische contactoppervlak van het componentenpakket, dit alles om GaN-vermogenstrappen in staat te stellen stromen tot 15 ampère (A) te schakelen zonder koellichaam (Afbeelding 2).
") Afbeelding 2: Temperatuurstijging versus fasestroom voor een GaN-vermogenstrap met een omgevingstemperatuur van 25,5 °C en bij verschillende PWM-frequenties. (Bron afbeelding: EPC)
Afbeelding 2: Temperatuurstijging versus fasestroom voor een GaN-vermogenstrap met een omgevingstemperatuur van 25,5 °C en bij verschillende PWM-frequenties. (Bron afbeelding: EPC)
De EPC23102 heeft ook robuuste levelconvertors van de low-side naar de high-side kanalen die zijn ontworpen om te werken onder zachte en harde switching condities - zelfs bij grote negatieve klemspanningen - en om valse triggering te voorkomen door snelle dV/dt-transiënten, inclusief die afkomstig van externe bronnen of aangrenzende fasen. Interne circuits integreren logica en functies voor het opladen en uitschakelen van de bootstrap. Beveiligingsfuncties voorkomen ongewenst inschakelen van uitgangs-FET's wanneer de voedingsspanning te laag is of zelfs uitvalt.
Een gebruiksklare evaluatieset voor motorinverters
De gemakkelijkste en snelste manier om een driefasige BLDC-motor met GaN-technologie in bedrijf te stellen, is het gebruik van EPC's EPC9176KIT-motorinverter-evaluatiekit. Het bestaat uit de EPC9176-motorinverterprintplaat en een DSP-controllerprintplaat. Een eenvoudige EPC9147E-controller plug-in-adapter voor besturing via een klantspecifieke hostcontroller is ook inbegrepen. De koppelingsconnector draagt de volgende signalen: 3 × PWM, 2 × encoder, 3 × Uphase, 3 × Iphase, UDC,IDC, en 2 × status-LED.
Als referentieontwerp vergemakkelijkt de EPC9176 motorinverterprintplaat het in-house circuitontwerp, terwijl de EPC9147A-controllerprintplaat, indien gebruikt met de motorBench-ontwikkelomgeving van Microchip Technology, gebruikers in staat stelt snel aan de slag te gaan zonder tijd te hoeven besteden aan coderen of programmeren.
De driefasige BLDC-motorinverter integreert drie EPC23102 GaN-halfbrugdrivers om AC- of DC-motors en DC/DC-vermogensconvertors aan te sturen. Met een RDS(on) van maximaal 6,6 mΩ veroorzaakt de eindtrap weinig warmteverlies bij belastingsstromen tot 28 A piek (Apk) of 20 A rms (ARMS) in constant bedrijf bij schakelspanningen tot 100 volt. Geconfigureerd voor meerfasige DC/DC-conversie, ondersteunt de EPC23102 PWM-schakelfrequenties tot 500 kHz en tot 250 kHz voor motoraandrijvingstoepassingen.
De 8,1 × 7,5 centimeter (cm) EPC9176 motorinverterprintplaat bevat alle kritische functionele schakelingen die nodig zijn om een complete motoromvormer te ondersteunen, inclusief DC-buscondensators, gatedrivers, geregelde hulpspanningen, fasespanning, fasestroom en temperatuurmeting, samen met beveiligingsfuncties en optionele harmonische of EMR-filters voor elke fase (Afbeelding 3).
") Afbeelding 3: De EPC9176-motorinverter heeft DC-buscondensators, gatedrivers, een spanningsregelaar, spanningsdetectie, stroom- en temperatuurbeschermingsfuncties en EMR-filters. (Bron afbeelding: EPC)
Afbeelding 3: De EPC9176-motorinverter heeft DC-buscondensators, gatedrivers, een spanningsregelaar, spanningsdetectie, stroom- en temperatuurbeschermingsfuncties en EMR-filters. (Bron afbeelding: EPC)
De driefasige GaN-inverter werkt bij ingangsspanningen van 14 tot 65 VDC. Hij schakelt zonder overshoot, wat resulteert in een soepel koppel en minimale loopgeluiden. De printplaat is geoptimaliseerd voor een GaN-typische snelle schakelsnelheid van minder dan 10 volt per ns (V/ns) en kan optioneel worden verkleind om een DC/DC-convertor te bedienen. Bovendien kunnen twee rotorpositiesensors (Hall-sensors) die op verschillende spanningsniveaus werken, worden aangesloten.
Trillingsvrij koppel en laag geluidsniveau
Een voorbeeld van een driefasige uitvoering van een BLDC-motor toont het effect van de dead-time parameterisatie op de soepele werking van de motor, en dus op de geluidsproductie. De vergrendelingstijd bij de schakelovergang van de hoog- en laag-zij FET van een halfbrug op basis van GaN FET's kan zeer klein worden gekozen omdat de GaN HEMT's extreem snel reageren en geen parasitaire overshoots produceren, zoals bij de langzamere MOSFET's het geval is.
Afbeelding 4 (links) toont een GaN-inverter die werkt bij een typische dode tijd voor MOSFET's van 500 ns bij een PWM-frequentie van 40 kHz. Wat een gladde sinusvormige fasestroom zou moeten zijn, vertoont een extreem hoge vervorming, hetgeen resulteert in hoge koppelrimpels en bijbehorende ruis. In Afbeelding 4 (rechts) werd de dode tijd teruggebracht tot 50 ns, waardoor een sinusvormige fasestroom tot stand kwam voor een soepel lopende motor met zeer weinig ruis.
") Afbeelding 4: Een dode tijd van 500 ns bij een PWM-frequentie van 40 kHz (links), typisch voor MOSFET's, veroorzaakt een hoge vervorming in de fasestroom die resulteert in hoge koppelrimpels en hoge ruisniveaus. Met een dode tijd van 50 ns (rechts) wordt een sinusvormige fasestroom tot stand gebracht, zodat de motor soepel draait met weinig ruis. (Bron afbeelding: EPC)
Afbeelding 4: Een dode tijd van 500 ns bij een PWM-frequentie van 40 kHz (links), typisch voor MOSFET's, veroorzaakt een hoge vervorming in de fasestroom die resulteert in hoge koppelrimpels en hoge ruisniveaus. Met een dode tijd van 50 ns (rechts) wordt een sinusvormige fasestroom tot stand gebracht, zodat de motor soepel draait met weinig ruis. (Bron afbeelding: EPC)
Minder rimpeling in de fasestroom betekent ook lagere magnetisatieverliezen in de statorspoelen, terwijl minder rimpeling in de fasespanning een hogere resolutie en een nauwkeurigere regeling van koppel en snelheid mogelijk maakt, vooral voor motoren met een lage inductie die in kleinere ontwerpen worden gebruikt.
Voor toepassingen met motoraandrijving die meer vermogen vereisen, zijn er twee GaN-inverterborden beschikbaar: de EPC9167HCKIT (1 kilowatt (kW)) en de EPC9167KIT (500 watt). Beide gebruiken de EPC2065 GaN FET, met een maximale RDS(on) van 3,6 mΩ en een maximale apparaatspanning van 80 volt. Terwijl het EPC9167-bord enkele FET's gebruikt voor elke schakelpositie, heeft de EPC9167HC twee parallel werkende FET's, die een maximale uitgangsstroom van 42 Apk (30 ARMS) leveren. De EPC2065 GaN FET ondersteunt PWM-schakelfrequenties tot 250 kHz in motorbesturingstoepassingen en maximaal 500 kHz in DC/DC-convertors.
Een nog hoger vermogen - tot 1,5 kW - wordt geleverd door het inverterbord in de EPC9173KIT. Het bord vormt de halfbrugvertakkingen van twee enkele EPC23101ENGRT GaN-gatedriver-IC's die slechts één geïntegreerde high-side power FET hebben. Dit bord kan worden uitgebreid als een buck, boost, half-bridge, full-bridge, of LLC-convertor. Hij levert uitgangsstromen tot 50 Apk (35 ARMS) en werkt bij PWM-schakelfrequenties tot 250 kHz, met passende koeling.
Zet de driver-stage binnen een paar minuten aan de gang
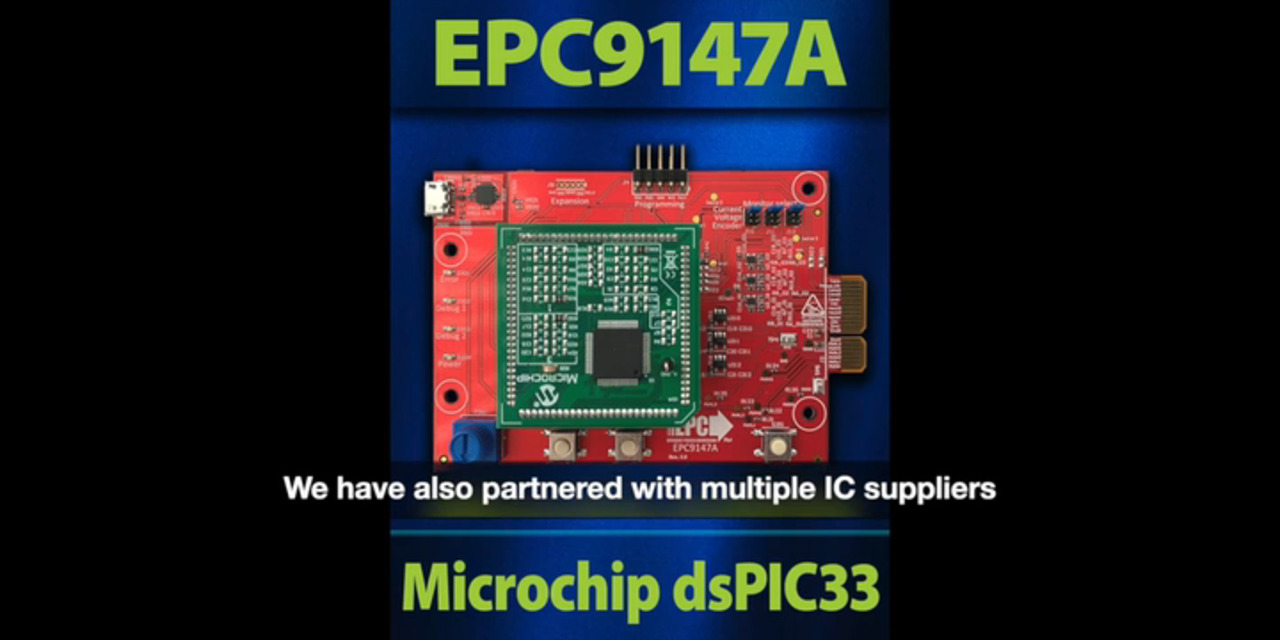
De snelste manier om het EPC9176 GaN-inverterbord te evalueren - zonder te hoeven coderen - is door het EPC9147A-controllerinterfacebord te gebruiken. Een insteekmodule (PIM) - de MA330031-2 - bevat de dsPIC33EP256MC506-I-PT 16-bit DSP van Microchip Technology (Afbeelding 5).
") Afbeelding 5: De universele controllerinterfacekaart EPC9147A biedt plaats aan diverse insteekmodules, zoals de MA330031-2 PIM, die gebaseerd is op de 16-bit dsPIC33EP256 DSP. (Bron afbeelding: EPC/Microchip Technology)
Afbeelding 5: De universele controllerinterfacekaart EPC9147A biedt plaats aan diverse insteekmodules, zoals de MA330031-2 PIM, die gebaseerd is op de 16-bit dsPIC33EP256 DSP. (Bron afbeelding: EPC/Microchip Technology)
Om de werking van de DSP-controllerinterface te vergemakkelijken, kunnen ontwerpers de motorBench Development Suite gebruiken:
- MPLAB X IDE_V5.45 en de aanbevolen update
- Code Configurator Plugin (DSP-specifieke compilatie)
- motorBench plugin 2.35 (motorvoorbeelden)
Voor deze bespreking wordt in het voorbeeld het EPC9146 GaN-motorinverterbord gebruikt, dus:
- Begin met het MCLV-2 of EPC-project voor de EPC914xKIT met de naam "sample-mb-33ep256mc506-mclv2.X".
De gebruiker kan eenvoudig het voorbeeld hex-bestand voor het EPC9146 GaN-motorinverterbord selecteren en dit flashen in de DSP dsPIC33EP256MC506 met behulp van een programmeeradapter, zoals PG164100 van Microchip Technology voor 16-bit microcontrollers. De aangesloten BLDC-motor (Teknic_M-3411P-LN-08D) is dan via de besturing handmatig bestuurbaar en werkt in sensorloze FOC-modus.
Als de motor niet naar tevredenheid draait of geconfigureerd moet worden voor een andere bedrijfstoestand, biedt motorBench ook een configureerbaar voorbeeldbestand dat gecompileerd moet worden vóór het flashen. Een elementaire maar belangrijke parameter voor GaN-motordrivers, zoals hierboven besproken, is een dode tijd van 50 ns of minder, die absoluut moet worden gecontroleerd alvorens het hex-bestand te compileren.
Aangepaste parameters voor een BLDC-motor
Om aangepaste BLDC-motorconfiguraties voor sensorloze FOC-werking te configureren met behulp van de motorBench IDE, kunnen gebruikers hun specifieke motorparameters meten en de relevante waarden invoeren in een configuratiebestand. De MOT-I-81542-A-motor van ISL Products International kan hier bijvoorbeeld dienen als testmotor. Hij verbruikt ongeveer 361 watt vermogen bij 24 volt en 6100 omwentelingen per minuut.
Deze vier motorparameters moeten eerst worden bepaald:
- Ohmse weerstand: Deze wordt met een multimeter gemeten tussen de klemmen van de statorspoel.
- Inductantie: Gemeten tussen de klemmen van de statorspoel met behulp van een multimeter.
- Poolparen: Om de poolparen te bepalen, moet de ontwerper twee fasen kortsluiten, de derde open laten, en dan met de hand het aantal vergrendelingen bij één asomwenteling tellen en het resultaat door twee delen.
- Back electromotive force (BEMF): De BEMF wordt gemeten tussen de klemmen van de statorspoel met behulp van een oscilloscoop. Daarvoor moet de ontwerper:
- Klem de sonde op twee fasedraden en laat de derde open.
- Draai de motoras met de hand en registreer de spanningsrespons.
- Meet de piek-piekspanning App en periode T- halve van de grootste sinus-halfgolf (Afbeelding 6).
") Afbeelding 6: De BEMF wordt bepaald door de piek-piekspanning App en de periode T-halve van de grootste sinus-halfgolf te meten. (Bron afbeelding: EPC)
Afbeelding 6: De BEMF wordt bepaald door de piek-piekspanning App en de periode T-halve van de grootste sinus-halfgolf te meten. (Bron afbeelding: EPC)
Verwijzend naar het bovenstaande projectvoorbeeld, bepaalde Microchip de volgende parameters voor de Teknic M-3411P-LN-08D motor (8,4 ARMS, acht polen, koppel = 1 Newtonmeter (Nm), en een vermogen van 244 watt):
- App = 15,836 Vpp
- T-halve = 13,92 ms
- Poolparen: pp = 4
- Microchip berekende vervolgens de BEMF-constante (voor 1000 tpm = 1 krpm) met behulp van vergelijking 1:
") Vergelijking 1
Vergelijking 1
 voor deze voorbeeldmotor
voor deze voorbeeldmotor
(voor motorBench is een waarde van 10,2 gebruikt)
- RL-L = 800 mΩ lijn-tot-lijn weerstand, min 100 mΩ door LCR-metersnoeren
- Ld = Lq = 1 mH gebruikt in dit voorbeeld, ondanks de meting van 932 microhenries (µH).
De vastgestelde parameters worden ingevoerd in het motorBench submenu Configure/PMSM Motor. Hiervoor kunnen ontwerpers gewoon het XML-configuratiebestand van een soortgelijk motortype gebruiken. Als alternatief kunnen de parameters worden ingevoerd in een nieuw aangemaakt (leeg) configuratiebestand dat kan worden geïmporteerd via de knop "Import Motor".
Conclusie
GaN-motordriver-IC's bereiken zeer efficiënte prestaties in batterij-aangedreven BLDC-motoraandrijvingen met een kleine vormfactor en een laag gewicht. Ze zijn geïntegreerd in de motorbehuizing, zijn goed beschermd, vereenvoudigen het ontwerp en de installatie van het apparaat en verminderen het onderhoud.
Ondersteund door referentiecircuits, voorgeprogrammeerde modelgebaseerde DSP-controllers en een motorontwikkelingsomgeving, kunnen ontwerpers en programmeurs van BLDC-motortoepassingen de circuitontwerptijd verkorten en zich meer richten op de ontwikkeling van toepassingen.
Disclaimer: The opinions, beliefs, and viewpoints expressed by the various authors and/or forum participants on this website do not necessarily reflect the opinions, beliefs, and viewpoints of DigiKey or official policies of DigiKey.